
The session ‘Planning for automated vehicles’ was part of the POLIS Conference 2020, which took place online from 30 November to 3 December. How can cities prepare for automation or should automation prepare for cities? With a focus on policy, planning and capacity-building. The session was chaired by Anna Clark from EIT Urban Mobility.
Presentations and contributors:
- Automated vehicles in Dutch cities: 3 actions you can do now to prepare yourself: Richard van der Wulp, City of Rotterdam
- Roadmap towards automation of EMT buses: SHOW and AUTO-BUS Sergio Fernández Balaguer, EMT Madrid
- Autonomous Vehicles: Stakeholder engagement and urban planning: Richard Laing, Robert Gordon University
- Building the capacity of cities to plan for automation – The Co-Exist automation-ready framework: Wolfgang Backhaus, Rupprecht Consult
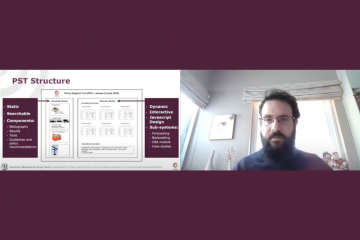
- Supporting policy making and planning for automated vehicles – the LEVITATE policy support tool: Apostolos Ziakopoulos, National Transport University of Athens
Anna concludes the session as follows: “Planning is a very important part of ensuring that we get the outcomes and impacts that we want, so based on the city policy goals. Public policy is going to be what determines this, rather than just the vehicle techinolgy, but they do go hand in hand.”
The session was recorded and can be viewed below:

