Authors: Apostolos Ziakopoulos (NTUA), Maria Oikonomou (NTUA), Julia Roussou (NTUA), George Yannis (NTUA)
- General information
The Hellenic Institute of Transportation Engineers (HITE) and the Hellenic Institute of Transport (HIT/CERTH) co-organized the 10th International Congress on Transportation Research (ICTR 2021), which was held on September 1st – 3rd 2021, at the Mediterranean Hotel in Rhodes, Greece. The spotlight theme of the 2021 Congress was “Future Mobility and Resilient Transport: Transition to innovation” (https://ictr.gr/). LEVITATE was represented in the conference by NTUA (https://www.nrso.ntua.gr/).
- CCAM workshop – Challenges & Lessons learned,
Wednesday, September 1st, 2021, (09:00 – 13:30).
The Conference started with a series of workshops, one of which was devoted to CCAM, titled Challenges & Lessons Learned in CCAM, organized by SHOW Innovation Action (https://show-project.eu/) and in specific by the Technical Management team of the Hellenic Institute of Transport (HIT) of CERTH. There were 12 presentations made – some of which originated from regular papers of the Conference and some of which being invited speeches – whereas the workshop closed with a round table. The work presented originated from SPACE, SHOW, AVENUE, WISE-ACT, Drive2theFuture, Trustonomy, SUaaVE, ICT4CART, EIMANTRA, LEVITATE, SPROUT and ARCADE initiatives as well as from CCAM Platform WG3.
NTUA represented LEVITATE actively in the CCAM workshop (i) with a presentation by Apostolos Ziakopoulos titled “Forecasting and backcasting of Connected Automated Vehicle impacts using multiple methodological inputs” (ii) with the participation and contributions of Professor George Yannis to the roundtable discussion of eight renowned experts.
Critical outcomes of the presentation include the reality that the integration of the expectations of different users (City/road management authorities, researchers, industrial practitioners) in a functional Policy Support Tool remains an uphill battle. Furthermore, backcasting capabilities for impact assessment provide a powerful means to complement forecasting and to define visions & goals to be reached. Large degrees of uncertainty remain for the CCAM landscape regarding the scope, form & feasibility of automation-based policy interventions. The combination of multiple methodologies for CCAM impact assessment brings considerable advantages (increased parameter coverage) but is hard to integrate different variable dependencies and requires high level coordination.
- Session II (A) – Intelligent Transport Systems,
Thursday, September 2nd, 2021, (14:30 – 16:30).
Session II (A) Advanced Intelligent Transport systems can improve current transportation systems both for passenger and freight. For the successful implementation of ITS in real conditions, it is critical to gather and combine different types of data (infrastructure-based, real time traffic data, as well as other open-source, dynamic or static data). Overall, CAVs are considered as a promising solution towards the improvement of the current traffic conditions. However, several simulation studies presented at this session indicated that no significant differences in terms of traffic-related parameters are expected. In addition, the level of improvement is critically affected by the proportion of traffic operated by CAVs (mixed traffic vs whole traffic operated with AVs).
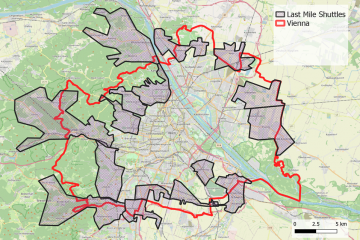
NTUA represented LEVITATE in the session with a presentation by Maria Oikonomou titled “Impacts of autonomous transit services on urban networks: The case of Athens, Greece”, focusing on the microsimulation work conducted within WP5 of LEVITATE.
Key outputs of the presentation include the findings regarding point-to-point shuttle bus services, which led to increased delays and total distance travelled, while on the contrary the on-demand service showed decreased delays and constant driven kilometers. The introduction of the different shuttle bus services did not significantly affect conflicts as well as emissions, which were significantly lower when the number of CAVs was increased. In a small-scale urban network, automation did not affect traffic-related measurements, while in a large-scale urban network decreased delays, increased distance travelled and reduced conflicts were noticed.
- Session IV(A) – Transport planning and policy,
Friday, September 3rd, 2021, (08:30 – 10:15).
Session IV(A) – Transport planning and policy addressed crucial issues examined and presented by expert researchers for the development and implementation of specific policies, tools and actions for achieving a successful transport planning in urban areas. As well established, sustainability plays an important role in all fields of transportation systems, thus it has to be seriously considered from the very beginning of a transport planning process. Therefore, actions and policies to be implemented should always be evaluated, leading researchers in the development and application of appropriate tools for achieving the best results in terms of sustainability.
NTUA represented LEVITATE in the session with a presentation by Apostolos Ziakopoulos titled “Forecasting impacts of Connected and Automated Transport Systems within the Levitate project.” This presentation placed more emphasis on the forecasting estimator of LEVITATE compared to the workshop presentation.
Several conclusions considered the future of the PST development, and the functionalities which will be available for the PST user as the LEVITATE project moves forward. Overall, it was highlighted that the LEVITATE PST aspires to become the go to, one stop shop tool for the calculation of societal impacts of automation by experts, authorities, stakeholders and any other interested party.
- Concluding remarks
As stated in the roundtable discussion of the CCAM workshop, and in the sessions co-influenced by LEVITATE inputs, CCAM initiatives should include holistic new paradigms that have to satisfy sustainable mobility while achieving transport safety, efficiency and environmental targets simultaneously. Stakeholder cooperation is essential to reach solutions satisfying the needs of road users, citizens, researchers, industry and authorities, and to achieve more clear and transparent outcomes.
Despite the projected elimination of human-related errors from automation, CCAM should not be treated as a de-facto substitute to conventional transport, but rather, a competitor that will have to strive hard for public acceptance. Public transport is proposed as a priority field for CCAM deployment due to both increased societal needs and levels of technological readiness.
- References relevant to the LEVITATE participation in ICTR 2021:
- Ziakopoulos A., Roussou J., Boghani H., Hu B., Zach M., Veisten K., Hartveit K.J., Oikonomou M., Vlahogianni E., Thomas P., Yannis G. (2021). “Forecasting impacts of Connected and Automated Transport Systems within the Levitate project.” 10th International Congress on Transportation Research (ICTR) 2021, Rhodes, Greece, 2-3 September 2021.
- Oikonomou M., Mourtakos V., Roussou J., Ziakopoulos A., Vlahogianni E., Yannis G. (2021). “Impacts of autonomous transit services on urban networks: The case of Athens, Greece”. 10th International Congress on Transportation Research (ICTR) 2021, Rhodes, Greece, 2-3 September 2021.
All NTUA presentations in ICTR 2021 are available online: https://www.nrso.ntua.gr/ictr2021-10th-international-congress-on-transportation-research-september-2021/